
Long-range FPV is the pinnacle of the hobby – pushing your quad kilometers out over mountains, coastlines, and forests, with nothing but a video feed and your skills keeping you connected. But long-range flying demands a fundamentally different setup than freestyle or racing. GPS rescue, battery efficiency, antenna selection, and failsafe configuration are not optional extras; they are the difference between coming home and watching your quad fly away forever. This guide walks you through building a reliable long-range system.
GPS Rescue: Your Insurance Policy
GPS Rescue in Betaflight will autonomously fly your quad back to the launch point if the control link fails or you trigger it manually. When configured correctly, it climbs to a safe altitude, flies home in a straight line, and descends gently. When configured incorrectly, it can fly the wrong direction, descend into a tree, or fail to activate at all. Here is exactly how to set it up properly.
First, ensure you have a GPS module that supports at least GPS+GLONASS (BN-220 or BN-880 are proven choices). Mount it with a clear view of the sky – on top of the battery strap works well. In Betaflight, configure the GPS on a free UART at 115200 baud with the UBLOX protocol. Verify satellite count and home position in the OSD before every flight.
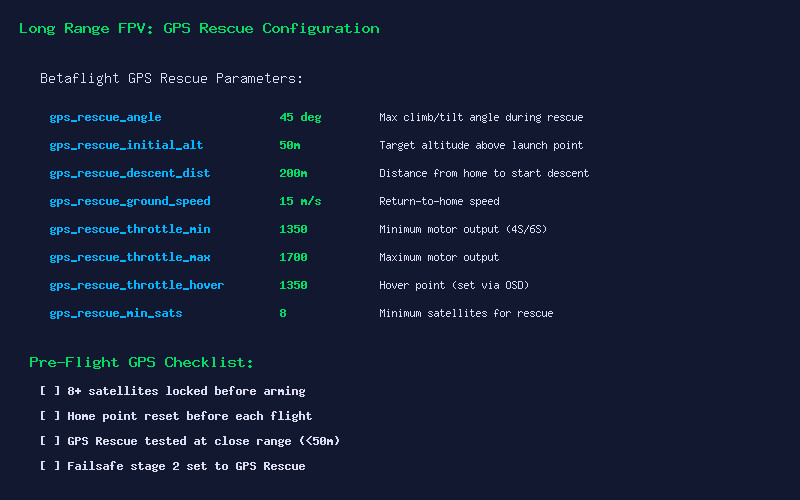
Key GPS Rescue parameters: Set gps_rescue_angle to 45 degrees (climb angle). Set gps_rescue_initial_alt to 50 meters – this is the altitude above your launch point the quad will climb to before heading home. Set gps_rescue_descent_dist to 200 meters – the quad starts descending when it gets within this distance of home. Set gps_rescue_ground_speed to 15 m/s (about 54 km/h) for a balance of speed and battery efficiency.
The throttle settings are critical. Set gps_rescue_throttle_hover to the value that makes your quad hover. You can find this by hovering in angle mode and reading the throttle percentage from the OSD. Set gps_rescue_throttle_min to 50 below hover and gps_rescue_throttle_max to 150 above hover. Set gps_rescue_min_sats to 8 – do not arm for long-range unless you have 8 or more satellites locked.
Configure Failsafe Stage 2 to GPS Rescue in the Betaflight Failsafe tab. Test GPS Rescue at close range (< 50 meters) before trusting it on a long-range flight. Flip your GPS Rescue switch and watch the quad climb, turn toward home, and begin its return. Land manually once you are confident it works.
Antenna Selection for Maximum Range
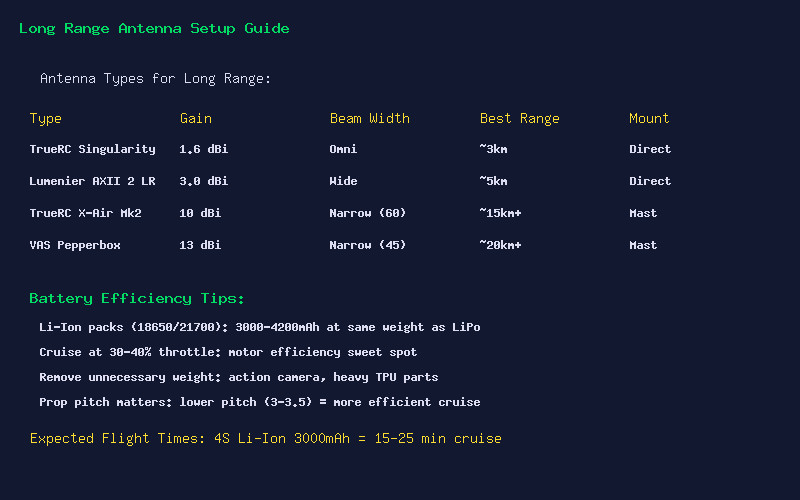
On the video side, directional antennas on your goggles are essential for long-range. The TrueRC X-Air Mk2 (10 dBi gain) and VAS Pepperbox (13 dBi) offer narrow but powerful beams that can maintain a clear video signal at 15-20+ kilometers. Point them in the general direction of your quad – within 30 degrees of center gives full gain. Pair a directional antenna with an omni like the Lumenier AXII 2 LR for coverage when the quad is overhead.
On the quad, a single high-quality omnidirectional antenna like the TrueRC Singularity or RushFPV Cherry mounted vertically gives the best all-around transmission pattern. For extreme long-range, consider a dipole antenna that radiates more horizontally, where your ground station will be.
Battery Strategy: Li-Ion Over LiPo
For flights beyond 5 kilometers, Li-Ion packs built from 18650 or 21700 cells offer a massive energy density advantage over LiPo. A 4S 3000mAh Li-Ion pack weighs about the same as a 6S 1300mAh LiPo (200g) but stores nearly three times the watt-hours. The tradeoff is lower discharge rate – Li-Ion cells typically deliver 10-15A continuous versus 100A+ for LiPo. This is fine for cruising at 30-40% throttle, but you cannot do punch-outs or freestyle on Li-Ion.
For mixed flying that includes some freestyle, a high-capacity LiPo like a 6S 1800mAh or 2000mAh gives you both power and reasonable range. Expect 8-12 minutes of mixed flying versus 4-6 minutes on a 1300mAh.
Efficiency Tips for Maximum Flight Time
- Prop pitch matters: Lower pitch props (3.0-3.5 inch pitch on 7-inch) are more efficient at cruise speed. Higher pitch (4.5+) is faster but burns battery quickly.
- Bi-blade over tri-blade: Two-blade props are 10-15% more efficient than three-blade. The slight loss in grip is worth it for range.
- Motor sizing: Oversized motors running at low throttle are inefficient. For a 7-inch long-range build, 2806.5 motors at 1100-1300KV are the sweet spot.
- Cruise at 35% throttle: This is the efficiency peak for most brushless motors. Use the OSD throttle indicator and hold steady cruise.
- Shed weight: Every gram costs milliwatt-hours. No action camera, no heavy TPU parts, minimal hardware.
Pre-Flight Checklist for Long Range
- 8+ GPS satellites locked, home point set and verified
- GPS Rescue tested at close range during this session
- Battery fully charged, flight time math checked (amp draw x planned flight time < 80% of pack capacity)
- Control link RSSI verified at 100m range before pushing out
- Video link clear with directional antenna pointed correctly
- Failsafe stage 2 set to GPS Rescue, not Drop
- Wind checked – headwind on return leg is a common cause of lost quads
Long-range FPV is an incredible experience, but it demands respect for preparation. A properly configured GPS rescue system, the right antennas, and an efficient power setup will bring your quad home every time. Fly far, fly smart, and always have a plan B.