
Introduction
The flight controller is the brain of your FPV drone. It reads gyro data 8,000 times per second, runs PID calculations, and sends motor commands — all in real time. In 2026, pilots face a growing selection of MCU (microcontroller) options: the budget-friendly F411, the ubiquitous F722, the powerhouse H743, and the newcomer AT32F435. This guide compares every option across processing power, UART count, gyro compatibility, and real-world flight performance to help you choose the right flight controller.
The MCU Landscape in 2026
Flight controller MCUs fall into four tiers based on processing power and features:
STM32F411 (F4 Entry Level)
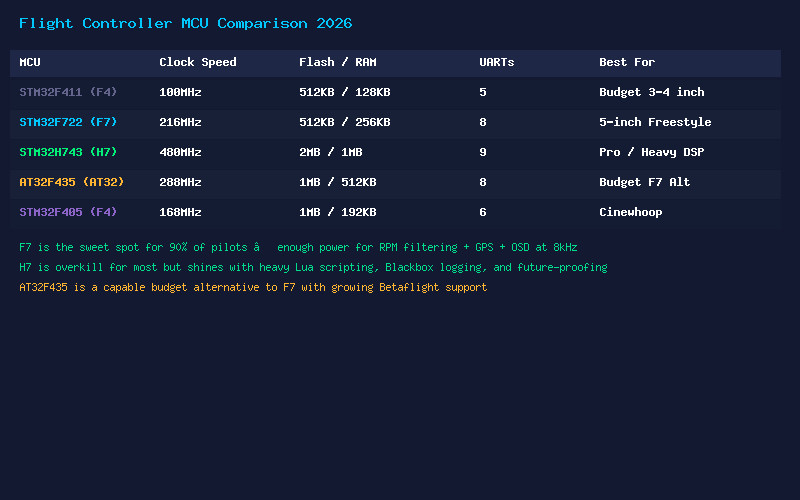
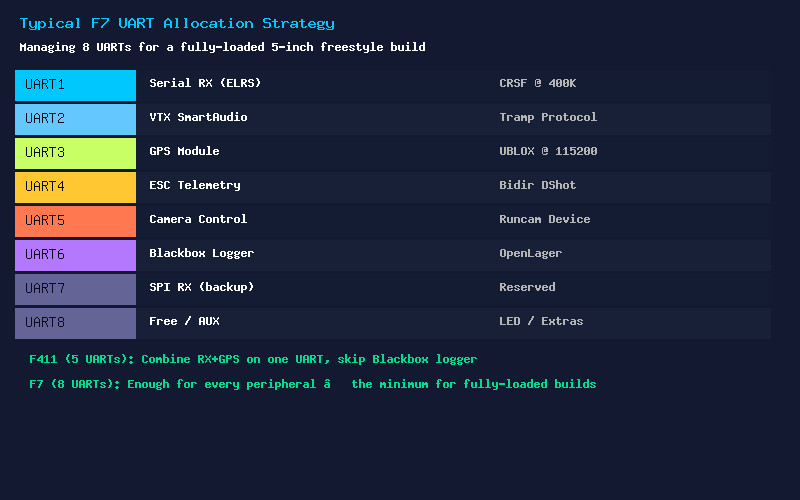
The F411 is the budget king. At 100MHz with 512KB flash and 128KB RAM, it is sufficient for basic 4KHz PID loops with RPM filtering enabled. However, the F411 has only 5 UARTs, which fills up fast. A typical build needs UARTs for: serial RX (ELRS), VTX SmartAudio, GPS, and ESC telemetry. That leaves one free UART — enough for a basic build but no room for camera control, Blackbox logging, or LED control.
The F411 runs Betaflight 4.6 comfortably at 4kHz PID loop with DSHOT300 and bidirectional DShot. At 8kHz, the CPU load exceeds 60%, risking instability during flight. This makes the F411 best for 3-4 inch budget builds where you do not need GPS, logging, or complex OSD.
STM32F722 / F745 (F7 Sweet Spot)
The F722 at 216MHz is the current gold standard for 5-inch builds. With 512KB flash and 256KB RAM, it handles 8kHz PID loops with RPM filtering, GPS Rescue, and full OSD without breaking 35% CPU load. Eight UARTs provide ample connectivity for fully-loaded builds.
F722 boards dominate the $35-55 price range and are available from virtually every manufacturer. The F722 supports Betaflight 4.6’s full feature set including dynamic idle, GPS Rescue 2.0, and dual-gyro configurations. For 95% of FPV pilots building a 5-inch quad, the F722 is the correct choice — any more processing power is unused overhead.
STM32H743 (H7 Power User)
The H743 at 480MHz is overkill for basic flight control — but it enables features that are simply impossible on F7 hardware. With 2MB flash and 1MB RAM, the H7 runs 8kHz PID loops at under 10% CPU, leaving enormous headroom for Lua scripting, high-rate Blackbox logging (2kHz), and future Betaflight features not yet imagined.
The H7’s real advantage is in the digital signal processing domain. Advanced notch filtering, dynamic harmonic analysis, and AI-assisted tuning algorithms (emerging in Betaflight 4.7+) demand H7-level compute. If you are a professional pilot, a developer testing new firmware features, or someone who wants a board that will never be CPU-limited, the H7 is worth the $60-90 premium.
AT32F435 (The New Challenger)
The AT32F435 is Artery’s answer to the STM32F7 at a lower price point. At 288MHz with 1MB flash and 512KB RAM, it slots between the F722 and H743 in raw specs. Betaflight 4.6 added official AT32 support, and boards like the JHEMCU GHF435AIO and DarwinFPV AT32 are appearing at $25-35 — undercutting equivalent F7 boards by $10-15.
The AT32 caveat is firmware maturity. Betaflight support for AT32 is solid but still has occasional edge-case bugs. Third-party target support is thinner than STM32, and some features (like certain OSD fonts) may not work identically. For budget-conscious builders willing to tolerate minor rough edges, AT32 is a compelling value proposition.
Gyro Selection: The Other Half of FC Quality
The gyroscope on your flight controller matters as much as the MCU. A noisy gyro forces heavier filtering, which increases latency and reduces flight performance — no amount of CPU power can fix bad gyro data.
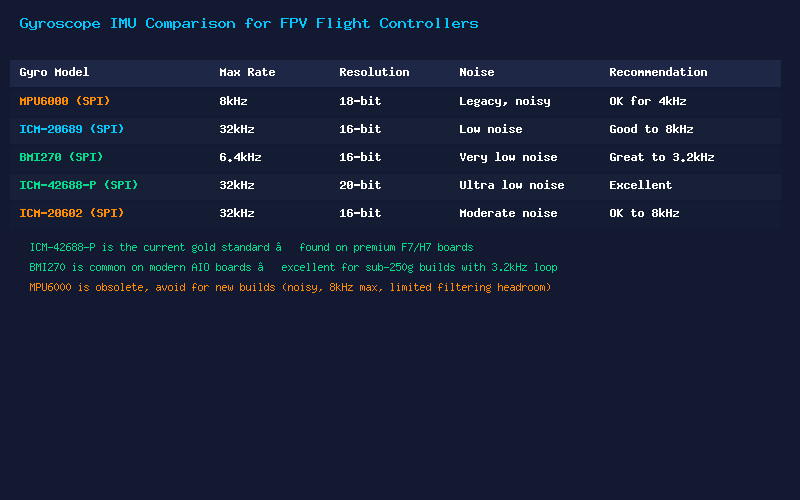
The gold standard in 2026 is the ICM-42688-P. This 20-bit gyro with ultra-low noise floor allows 8kHz PID loops with minimal filtering — just a single dynamic notch and a modest lowpass filter. Found on premium F7 and H7 boards from T-Motor, Flywoo, and Diatone.
The BMI270 is common on AIO boards and is excellent for 3.2kHz loops. Its lower maximum sample rate (6.4kHz) means you should run 3.2kHz PID loop for proper Nyquist headroom, but its noise performance is excellent at that rate. Most sub-250g builds will never notice the difference between 3.2kHz and 8kHz.
Avoid the MPU6000 in new builds. While ubiquitous on older boards, this 18-bit SPI gyro is noisier than modern alternatives and limits your filtering headroom. The 8kHz limit and high noise floor mean you must run heavier filtering, which reduces the prop wash handling and overall feel that modern Betaflight can deliver.
Making Your Choice
- Budget 3-inch / tiny whoop: F411 AIO with ICM-20689 or BMI270. Under $35 for a complete FC+ESC+ELRS board.
- 5-inch freestyle (most pilots): F722 with ICM-42688-P. $35-50 for the FC, add a separate 4-in-1 ESC. Handles everything you will ever need.
- Fully loaded 5-7 inch: F722 or H743 with ICM-42688-P. Add GPS, Blackbox, and camera control without UART anxiety.
- Budget alternative: AT32F435 with BMI270. Saves $10-15 versus F7 with 95% of the performance. Check Betaflight compatibility before buying.
- Future-proof / developer: H743 with ICM-42688-P. Maximum headroom for next-gen firmware features.
Conclusion
The flight controller market in 2026 offers options at every price point and performance level. For most pilots building a 5-inch quad, an F722 board with a quality ICM-42688-P gyro is the clear winner — sufficient processing power for the full Betaflight feature set, 8 UARTs for connectivity, and excellent gyro performance at a reasonable price. The H7 is seductive but unnecessary for flying; the AT32 is compelling on a budget but slightly less polished. Match your FC to your build complexity, and spend the money you save on better motors.